飛行中のドローンを別ドローンで客観視 2画面と模型で操縦を簡単に 東北大など研究
東北大学とシンガポール国立大学の研究チームは、 飛行中のドローンを別のドローンから撮影し、パイロットの操縦をサポートするシステム「Third-Person Piloting」を開発した。別のドローンによる第三者視点の映像により、パイロットが操縦するドローンの周囲の状況を理解しやすくなる。
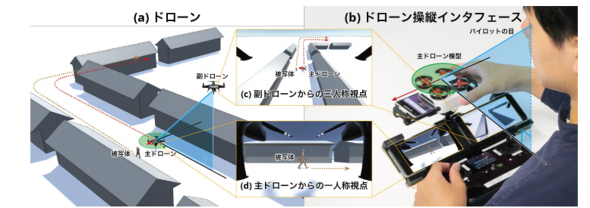 インタフェースの概要 (a)主・副ドローンと被写体の位置関係、(b)パイロットの視点、コントローラー、主ドローンの模型の位置関係、(c)副ドローンによる三人称視点、(d) 主ドローンによる一人称視点
インタフェースの概要 (a)主・副ドローンと被写体の位置関係、(b)パイロットの視点、コントローラー、主ドローンの模型の位置関係、(c)副ドローンによる三人称視点、(d) 主ドローンによる一人称視点
具体的には、 メインの操縦対象のドローン(主ドローン)を中心とした軌道上(図では上部後方)に2台目のドローン(副ドローン)を飛ばす。主ドローンは一人称視点のカメラ映像、副ドローンは三人称視点のカメラ映像を撮影し、パイロットが視聴できるようにした。
2台の視点の位置関係をインタラクティブかつ直感的に制御するために、2つの座標系の対(ペア)を考える「座標系対連動法」に基づくアルゴリズムを開発した。これにより、副ドローンは主ドローン周囲の軌道上を自由に飛行し、さまざまな角度から三人称視点の映像を撮影できる。
パイロットのコントローラー部分には、2台のスマートフォンモニターを装着(着脱可能)。左に主ドローンからの一人称視点映像、右に副ドローンからの三人称視点映像を表示する。手前の2本のスティックで主ドローンを操縦し、その操縦に追従するように副ドローンが半自動で飛行する仕組みだ。前方のスマートフォン上の模型で主ドローンをどの角度から撮影するかを制御する。
 提案ドローン操縦コントローラー (左)正面図 (右)自由雲台上の模型
提案ドローン操縦コントローラー (左)正面図 (右)自由雲台上の模型
2台の位置関係は、模型の操作、パイロット視点の座標系、主ドローンと副ドローンの2つの座標系の対を考えるアルゴリズムで割り出す。このアルゴリズムを用いて、主ドローン模型の操作内容から副ドローンの位置が計算される。
ドローンとパイロットそれぞれの座標系が連携しているため、パイロットが実際に模型を見る視点と、副ドローンが主ドローンを見る視点が連動するのも特徴だ。
実際に三人称視点映像を見たパイロットは「主ドローンとその周囲の障害物や被写体との位置関係が分かりやすくなった」と感想を述べており、操縦の質を向上するのに役立つことを実証した。
Copyright © ITmedia, Inc. All Rights Reserved.
この記事の著者
関連記事
こんなメディアも見られています
ITmedia NEWSに関連する情報をお探しであれば、こちらのメディアもお役に立てるかもしれません。
SpecialPR
本日の新着記事
アクセスランキング
-
1
陸自が「イオンモール熊本」内部をドローン撮影 防衛省が映像公開
-
2
イオンモール熊本内部の撮影、国産ドローンが活躍 日本企業2社が自衛隊などと協力
-
3
PayPayアプリで熊本地震への寄付が可能に 最短3ステップ・1円から
-
4
農水省の“クソダサ”ポスター話題 「AIよりよっぽど良い」の声も 担当者に狙いを聞いた
-
5
“ダサい”不評の「ドコモの銀行」、従来のアプリアイコン選択可能に 「ご意見・ご要望も踏まえ」
-
6
熊本「通れた道」マップ、トヨタが公開 ホンダも「通行実績情報マップ」
-
7
「Xが情報収集に役立たない……」熊本地震で不満の声続出 「Twitterを返して」
-
8
TSMC熊本工場、段階的に通常操業へ 熊本の地震で一時中断、従業員の無事確認 台湾報道
-
9
タムロン、ソニーからの買収提案認める 特別委員会を設置して検討
-
10
熊本で非常時Wi-Fi「00000JAPAN」発動中 KDDIが無料開放、他社ユーザーも利用可
ITmedia NEWS SNS
インフォメーション
注目情報をチェック
ITmediaNEWSをフォロー
あなたにおすすめの記事PR