Innovative Tech(AI+)
「すずめの戸締まり」に登場の“3本脚の椅子”を再現したロボット 東大が開発 歩行し倒れても起き上がる
Innovative Tech(AI+):

このコーナーでは、2014年から先端テクノロジーの研究を論文単位で記事にしているWebメディア「Seamless」(シームレス)を主宰する山下裕毅氏が執筆。新規性の高いAI分野の科学論文を山下氏がピックアップし、解説する。
X: @shiropen2
東京大学情報システム工学研究室に所属する研究者らが発表した論文「Body Design and Gait Generation of Chair-Type Asymmetrical Tripedal Low-rigidity Robot」は、新海誠監督のアニメ映画「すずめの戸締まり」に登場する3本脚の椅子のキャラクターをモチーフにした非対称3脚低剛性ロボットを開発した研究報告である。歩行するだけでなく、3本脚なのに倒れても自分で起き上がれるのが特徴だ。
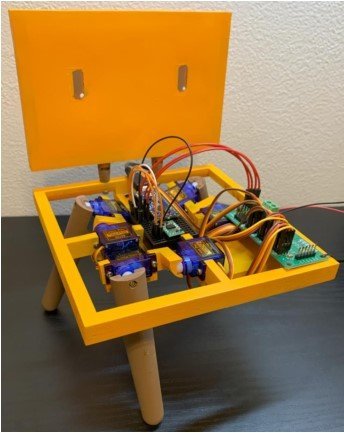 開発した3本脚の椅子ロボット
開発した3本脚の椅子ロボット
このロボットは、本来4本脚の椅子から1本脚がなくなったことで、体に対して非対称で不完全な脚配置となっており、容易にバランスが取れない特殊な構造をしている。
ロボット全体は3Dプリンタで製造した躯体を使用し、6つのサーボモーターを組み込んでいる。各脚は、2つのサーボモーターを使ったジンバル型2自由度構造である。制御系にはArduino Nano Everyを使い、IMUセンサーからロボットの姿勢を取得する。これらは外部のPCと通信している。ロボットの価格は約60ドルである。
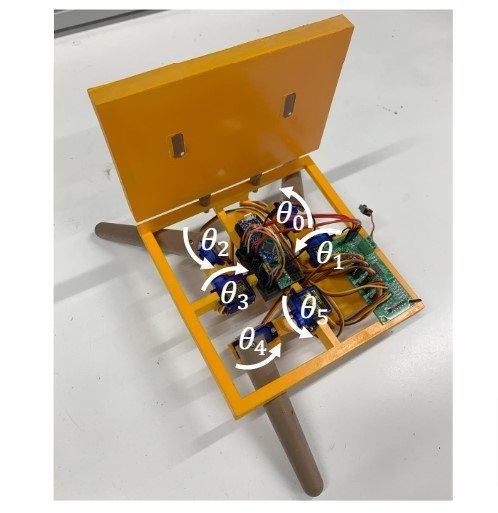 サーボモーターの位置と回転方向
サーボモーターの位置と回転方向
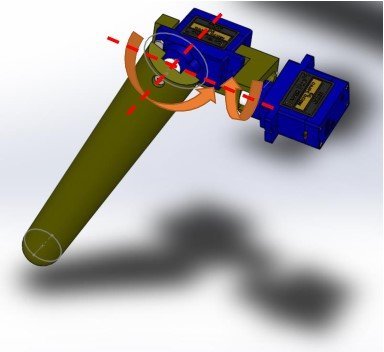 脚1本に対してサーボモーターを2つ搭載
脚1本に対してサーボモーターを2つ搭載
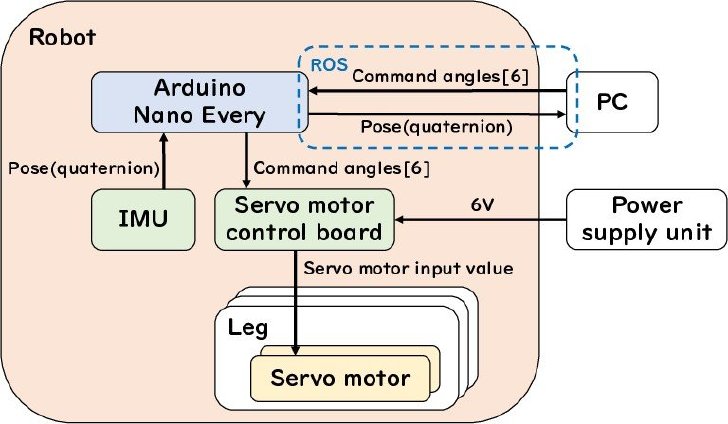 システムの概要
システムの概要
研究チームは、提案ロボットにおいて「必要な姿勢をつなぐ方法」と「強化学習による方法」の2つの手法で歩行動作と起き上がり動作の生成を行った。
「必要な姿勢をつなぐ方法」では、実機で試行錯誤を重ねて発見した歩容に必要な姿勢をつなぐことで歩容を生成。「強化学習による方法」では、物理シミュレーション環境において、強化学習アルゴリズム「Proximal Policy Optimization」(PPO)を用いて歩容を生成し、それを実機に反映させる。
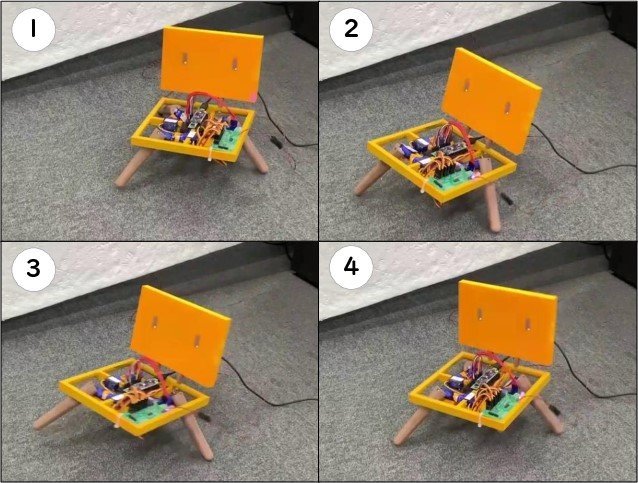
その結果、両手法ともに歩行と起き上がりを実現できたが、手法によって相違点が見られた。歩行動作では、強化学習による歩容の方が、3本脚を広げて振動しながら安定性を保ち前進するのに対し、姿勢をつなぐ方法では1本ずつ脚を出して前進するため、転倒リスクが高かった。
 「必要な姿勢をつなぐ方法」の歩行時の様子
「必要な姿勢をつなぐ方法」の歩行時の様子
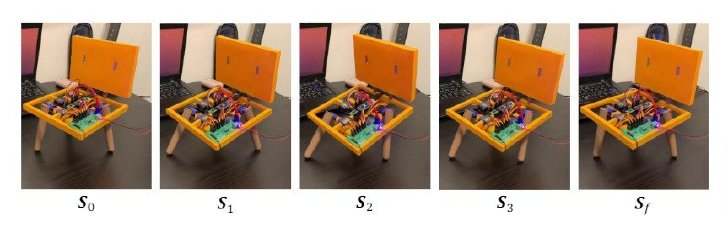
 「必要な姿勢をつなぐ方法」の起き上がり時の様子
「必要な姿勢をつなぐ方法」の起き上がり時の様子
 「強化学習による方法」の歩行時の様子
「強化学習による方法」の歩行時の様子
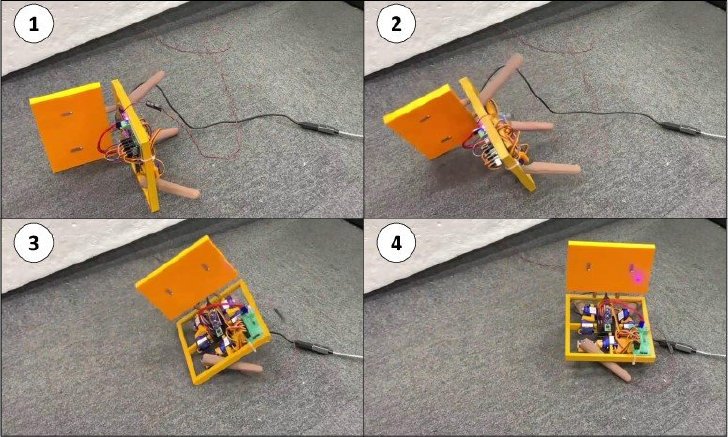 「強化学習による方法」の起き上がり時の様子
「強化学習による方法」の起き上がり時の様子
一方、起き上がり動作では両手法で座面を起き上がる方向と反対に傾けて反動を利用するという似たような動きが見られたが、強化学習ではさらに脚を振ることで生じる慣性力を利用して起き上がろうとする特有の動きが見られた。
また、強化学習による推論モデルにはIMUセンサーからのフィードバックが含まれているため、座面の右側面、背面、左側面が地面についているなどさまざまな初期姿勢からの起き上がりに成功した。
この研究は、非対称で不完全な体構造を持つロボットでも、試行錯誤で姿勢を見つけてつなげたり、強化学習を用いたりすることで、歩容生成が可能であることを示した。姿勢をつなぐ方法は比較的容易に所望の動作に特化した歩容を素早く生成できる一方、強化学習による方法はロボットの体構造を考慮に入れたロバストな動きを含んでおり、さまざまな初期姿勢からの起き上がり動作の実現など適応力が高かった。
Source and Image Credits: Inoue, Shintaro, et al. “Body Design and Gait Generation of Chair-Type Asymmetrical Tripedal Low-rigidity Robot.” arXiv preprint arXiv:2404.05932(2024).
Copyright © ITmedia, Inc. All Rights Reserved.
Innovative Tech(AI+)
2019年の開始以来、多様な最新論文を取り上げている連載「Innovative Tech」。ここではその“AI編”として、人工知能に特化し、世界中の興味深い論文を独自視点で厳選、解説する。執筆は研究論文メディア「Seamless」(シームレス)を主宰し、日課として数多くの論文に目を通す山下氏が担当。イラストや漫画は、同メディア所属のアーティスト・おね氏が手掛けている。
この記事の著者
関連記事
こんなメディアも見られています
ITmedia AI+に関連する情報をお探しであれば、こちらのメディアもお役に立てるかもしれません。
SpecialPR
よく見られているカテゴリー
アクセスランキング
-
1
ひろゆき氏「SIer衰退予測」、AI代替の「逆転現象」の理由 2026年に生き残るエンジニア“4つの役割”
-
2
Excelの10万行データを3分でAIに処理させる、M365 Copilotの使い方
-
3
リコーが多能工ヒューマノイドを披露、工場ではPoCから導入に向けた実証段階へ
-
4
解剖・孫正義氏の「ガチョウ論」 「ソフトバンクG株価が低過ぎ」主張を信じてよいのか
-
5
「今日言うつもりはなかったが……」 孫正義氏が明かした「ロボット自動量産工場」の実態
-
6
カインズが画像AIで売上UP模索、店頭でのインテリア“試着”をテスト 立ちはだかる「正確性と効率」の壁
-
7
AIが食い尽くすメモリ供給 企業ITを揺らす価格高騰
-
8
AIは設計者を置き換えるのか Autodesk幹部に聞くCADと設計データの未来
-
9
ローカルLLMは本当に手元で動くのか? ハードウェアとモデルの現実的な選び方【2026年春】
-
10
日立、メインフレーム事業から撤退へ ハード製造終了から9年後の決断
SpecialPR
ITmedia AI+ SNS
インフォメーション
注目情報をチェック
ITmedia AI+をフォロー
あなたにおすすめの記事PR