富士通、人とロボットの共同作業支える新技術 モノ多い場でもそれぞれの動き予測、「フィジカルAI」見据え
富士通は12月2日、人とロボット、または複数のロボットによる共同作業に向けた予測技術「空間World Model技術」を開発したと発表した。空間内の人とロボットの相互作用を予測する技術で、今後、研究拠点での実証実験を進めるほか、デモも公開する予定。
近年、ロボットを自律的に動かすため、物理法則を理解するAIモデル「フィジカルAI」の活用が注目を集めている。ただし、フィジカルAIには頻繁に変化する複雑な状況下での空間認識や、未来の予測が困難という課題もある。そのため、人が生活する住宅やオフィスではなく、物流倉庫などの整備された環境での活用が中心になっている。
そこで空間World Model技術では、映像内の人やロボットなどの物体を基準に、複数のカメラ映像を統合し、空間を認識する仕組みを採用した。これにより、防犯カメラやロボットに搭載したカメラの映像から、変化する空間をリアルタイムで把握できるようになったという。
また、空間内の人やロボット、モノの変化を示す3Dの時系列データを学習。複数の主体の相互作用から、それぞれが次に取る行動を推定できるようにした。これらの組み合わせにより、カメラ映像から人の行動や目的を推定するベンチマーク「JRDB-Social」では、他者の行動意図の推定精度を同社比で3倍高められたとしている。
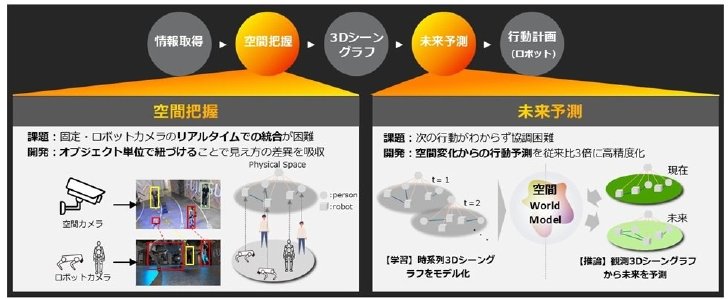 空間World Model技術の概要(出典:プレスリリース)
空間World Model技術の概要(出典:プレスリリース)
空間World Model技術は、2026年3月までに、同社の主要な研究拠点「Fujitsu Technology Park」(神奈川県川崎市)での実証実験を進める。なお、1月6日から9日まで米国のラスベガスで開催されるイベント「CES2026」では、デモンストレーションも実施予定。
Copyright © ITmedia, Inc. All Rights Reserved.
関連記事
こんなメディアも見られています
ITmedia AI+に関連する情報をお探しであれば、こちらのメディアもお役に立てるかもしれません。
SpecialPR
よく見られているカテゴリー
アクセスランキング
-
1
GMO熊谷氏「在宅勤務廃止」発言を釈明 「作業はAIに任せ、人はオフィスに」
-
2
Hugging FaceにAI主導のサイバー攻撃 防御もAIで対抗するも、商用モデルは解析拒否で「GLM」採用
-
3
「Claude Fable 5」サブスクに統合 Max・Team Premiumプラン対象
-
4
AMDとMicrosoftが戦略的提携を拡大 新AIラックスケール「Helios」をAzureに大規模導入へ
-
5
Google、「NotebookLM」を「Gemini Notebook」に改称 Geminiエコシステムへの統合を強化
-
6
日本再起の旗印となるか、国産マルチモーダルAI基盤「FRONTia」が始動
-
7
ゼロから分かる「Claude」の教科書 ChatGPTと比べて分かった強みとは?
-
8
強気値上げで自爆か ClaudeやGeminiに押され「M365 Copilot」は一人負け?:888th Lap
-
9
NTT、ソフトバンク、サカナAI――国産AI開発「成功組」の“ある共通点”
-
10
「AIエージェントの約半数が"戦力外"になる」 なぜ企業は使いこなせない?
SpecialPR
ITmedia AI+ SNS
インフォメーション
注目情報をチェック
ITmedia AI+をフォロー
あなたにおすすめの記事PR