Innovative Tech
“サイボーグゴキブリの群れ”をコンピュータで操作 阪大らがナビシステム提案
Innovative Tech:

このコーナーでは、2014年から先端テクノロジーの研究を論文単位で記事にしているWebメディア「Seamless」(シームレス)を主宰する山下裕毅氏が執筆。新規性の高い科学論文を山下氏がピックアップし、解説する。
X: @shiropen2
大阪大学とシンガポールの南洋理工大学に所属する研究者らが発表した論文「Natural-artificial hybrid swarm: Cyborg-insect group navigation in unknown obstructed soft terrain」は、生きている昆虫(マダガスカルオオゴキブリ)に小型の電子制御装置を取り付けてサイボーグ化し、複数のサイボーグゴキブリを群れとして制御することで、未知の複雑な地形を移動させるナビゲーションシステムを提案した研究報告である。
 “サイボーグゴキブリの群れ”を使ったナビシステム、阪大らが提案
“サイボーグゴキブリの群れ”を使ったナビシステム、阪大らが提案
従来のロボットは、障害物回避や未知環境への適応、長時間の稼働といった点で限界があった。それに対し、昆虫のサイボーグ化は、昆虫の優れた移動能力や環境適応能力、エネルギー効率の高さを生かせる可能性がある。しかし、個々の昆虫への刺激に対する反応のばらつきにより、複数のサイボーグ昆虫を協調制御することは技術的に難しい問題であった。
この研究では、観光客を案内するツアーガイドグループの行動から着想を得た制御アルゴリズムを考案。このアルゴリズムは、リーダー1体とフォロワー複数体で構成し、リーダーのみがゴールの位置情報を知っている。
 20匹のサイボーグ化したゴキブリが協力し、未知の環境を探査
20匹のサイボーグ化したゴキブリが協力し、未知の環境を探査
各サイボーグゴキブリが近くに仲間が十分にいるときは自由に動き回ることを許容し、離れすぎているときはグループに近づくように電気刺激で制御する。つまり、ゴキブリ本来の能力や自律性を活用しつつ、ときに電気刺激で制御することでバッテリー消費を抑えたシステム全体のロバスト性を高めることができる。
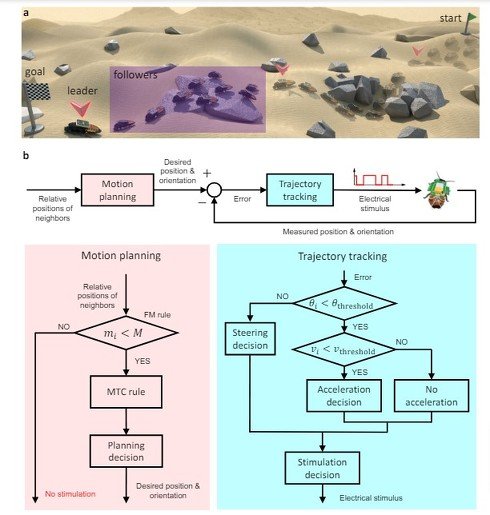 集団を制御するアルゴリズム
集団を制御するアルゴリズム
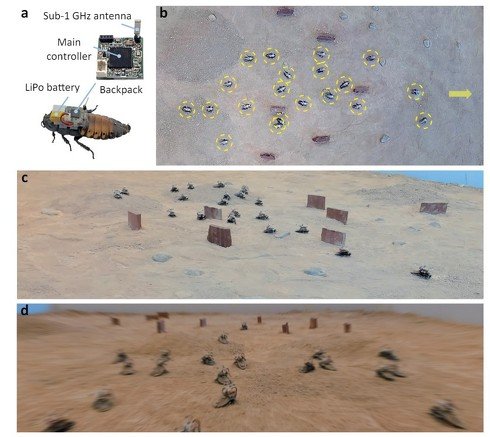
各ゴキブリには、バッテリー、小型コンピュータ、中央コンピュータと無線通信するアンテナで構成される「バックパック」を装着。またゴキブリの両側にある感覚器官に電極を埋め込んでいる。個々のゴキブリに搭載した小型コンピュータがそれら電極に電圧を印加することでゴキブリの移動方向を制御する。
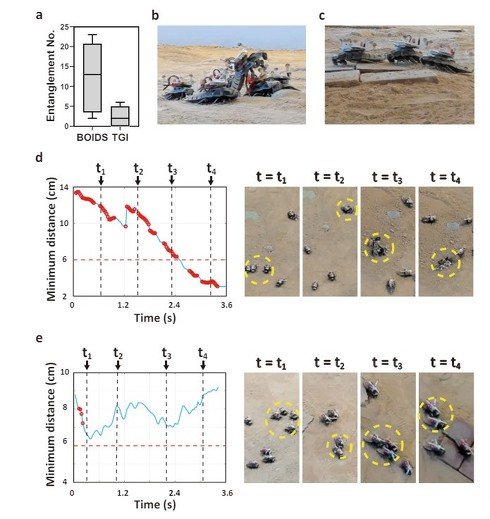
提案手法を、1匹のリーダーと19匹のフォロワーから成る20匹のサイボーグゴキブリの群れに適用し、岩や丘のある3.5m四方の砂地での走行実験を行った。その結果、10回の試行全てにおいて、リーダーを含む全てのサイボーグゴキブリが事前情報なしで障害物を越えて目的地に到達することに成功した。
また実験中、1匹が障害物にはまり込んだ際、仲間が回避しながら引っ張ることで救出したり、サイボーグゴキブリが誤ってあおむけになった際、近くの昆虫が協力して起き上がらせる興味深い行動を観察した。
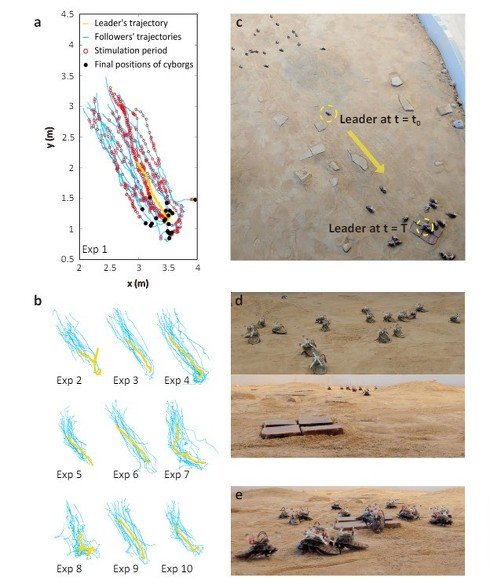 黄色がリーダーゴキブリの動き、水色がその他19匹のゴキブリの動きを示す
黄色がリーダーゴキブリの動き、水色がその他19匹のゴキブリの動きを示す
 実験時のゴキブリ同士が絡み合いながら進む様子
実験時のゴキブリ同士が絡み合いながら進む様子
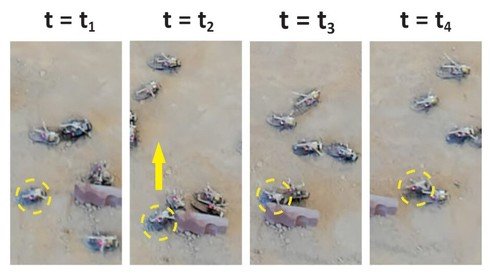 障害物に引っ掛かっている仲間を助けている様子
障害物に引っ掛かっている仲間を助けている様子
 転倒している仲間を助けている様子
転倒している仲間を助けている様子
この研究によるサイボーグゴキブリの群知能は、ロジスティクスや災害対応、農業など、ロボットだけでは対応が難しいさまざまな分野への応用が期待される。
Source and Image Credits: Bai, Yang, et al. “Natural-artificial hybrid swarm: Cyborg-insect group navigation in unknown obstructed soft terrain.” arXiv preprint arXiv:2403.17392(2024).
Copyright © ITmedia, Inc. All Rights Reserved.
Innovative Tech
2019年にスタートした本連載「Innovative Tech」は、世界中の幅広い分野から最先端の研究論文を独自視点で厳選、解説している。執筆は研究論文メディア「Seamless」(シームレス)を主宰し、日課として数多くの論文に目を通す山下氏が担当。イラストや漫画は、同メディア所属のアーティスト・おね氏が手掛けている。
この記事の著者
関連記事
こんなメディアも見られています
ITmedia NEWSに関連する情報をお探しであれば、こちらのメディアもお役に立てるかもしれません。
SpecialPR
本日の新着記事
アクセスランキング
-
1
防衛省の「クーラー300台」投稿動画でビックカメラのトラックが注目を集める 同社「販売用の在庫を迅速に提供」
-
2
ドコモ、ahamoを30→40GBに増量 8月1日から 料金据え置きの新キャンペーン
-
3
セブン&アイ、共通会員IDのPayPay統合を正式発表 ソフトバンクや三井住友カードなどが計3000億円出資
-
4
一般消費者が「空調服」と書いたら商標権侵害? 公式Xの注意喚起が波紋、弁理士の見解は
-
5
ソニー、タムロン買収提案の狙いを説明 「イメージング事業の発展につながる」
-
6
農水省の“クソダサ”ポスター話題 「AIよりよっぽど良い」の声も 担当者に狙いを聞いた
-
7
「文スト」スマホゲーム、きょう告知→あす終了 突然のサ終にユーザー混乱 運営元の廃業で
-
8
タカラトミー、デュエマアプリで個人情報漏えいか 最大15万5000人分 氏名や住所など閲覧の恐れ
-
9
「楽天ドライブ」アプリから「データ漏洩」「ハッキングした」通知? 運営元「緊急調査中」「通知を開かないで」
-
10
「不気味の谷を越えた」? 中国の美男美女型ロボット「U1」話題 286万円から
ITmedia NEWS SNS
インフォメーション
注目情報をチェック
ITmediaNEWSをフォロー
あなたにおすすめの記事PR