PICでもっと遊ぶその1「ラジコンサーボを自由自在に動かす」:夏でも楽しい工作教室(1/3 ページ)
夏のテーマは「サーボを動かせ!」
「PICで遊ぶ工作教室」の第2フェーズはサーボをテーマにPICのプログラムを行う。ここで言う「サーボ」とはラジコン用サーボ(RCサーボ)のことだ。調べてみると、非常に単純な信号で制御でき、入手も容易だ。PICのプログラミング題材としてもよく使われているし、ここ数年盛り上がっている「ロボット」の制御用としても使われている。
とはいうものの、サーボを題材に選んだのは個人的な、そして切実な事情がからんでいる。かねてからやりたいと思っているテーマに「デジカメの電池テスト」というのがある。
もちろん、テストをおこなう以上は可能な限り同じ条件でおこなうというのが「テストのお約束」なのだが、デジカメの業界標準測定条件(CIPA DC-002-2003:電池寿命測定法というのが人に優しくなく、恐ろしいほどの手間がかかる(要は雑誌仕事でやるには割に合わない)のだ。
ここでテストの条件をざっと紹介しよう。30秒に1回撮影し、毎回ズームを動かし、2回に1回ストロボを付け(つまり毎回ストロボボタンを押す)、10回に1回電源をON/OFFする……、この条件を人手で行うとするとまさに「こまねずみのごとく」撮影マシンと化す必要がある。
実は数カ月前に(通常よりもお金になる)某広告企画でテストをおこなったのだが、初日にして「止めておけばよかった………」と後悔するほど面倒であった。テスト条件をより公平にし、省力化という観点でも自動化が必要となる。
ところが、テストの機材が借り物ということもあり、自動化を行うのにカメラを分解して自動化するわけにもいかないので、どうしても外部でボタンを「ポチッと」押してくれる機械が必要。つまり、それが「サーボを使った自動化装置」というわけだ。
実際にテスト装置を作るとなるとメカも作らなければならないし、当面デジカメの撮影枚数テストなどという仕事が来ない(だろう……)などの障害もあるのでまだ手をつけていないが、プログラムによるサーボの操作ノウハウだけはつけておいたほうがよいというわけだ。
サーボはメーカーによるの違いもあまりないようで、入手も専門店の通販で容易におこなえる(アキバ周辺にもラジコンの専門店があり、ロボット関連としてツクモロボット王国や一連の連載でたびたび登場する千石電商でも扱いがある)。
基本的にサーボの価格は汎用性、精度、速度、パワー、重量、サイズで決まる。ラジコンでおなじみのメーカーとしては「KO」「JR」「双葉」「三和」などがあるが、お試しレベルではどれでも構わない。今回は三和の標準的なサーボとなる「SANWA SRM-102Z」を用意した。秋葉原で買うならラジコン専門店でどこでも買えるほか、単に動かすという今回の目的ならば千石電商で扱っている一番安いRCサーボ(ミニスタジオ扱いのRB303)もほぼ同スペックだ)。オンラインのカタログを見るとスペックは以下のように記載されていた。
| 速度 | 0.2秒/60度(4.8ボルト) |
| 寸法 | 39.0×20.0×36.0ミリ |
| トルク | 3.0キロ・センチ(4.8ボルト) |
| 重量 | 45グラム |
| コネクタ | Zコネクタ仕様 |
 今回はこれを動かすというのが目標。
今回はこれを動かすというのが目標。ここで「Zコネクタ」と書いてあるのは、三和のコネクタ規格の新タイプ、という意味だ。古いラジコンから引っ張り出す人もいるだろうから書いておくと、三和の場合、コネクタとケーブル色の関係は以下のようになっている。
| 色 | 旧 | Z | 意味 |
| 青 | 1 | 1 | サーボ |
| 赤 | 3 | 2 | 電源 |
| 黒 | 2 | 3 | GND |
となっていて、電源が逆だ。ちなみに他社の場合も電源は赤黒で普通どおり、サーボ信号が白、黄となるようなのでケーブルの色で判断すればよさそうだ。コネクタはDIPピッチのヘッダピンに差すようになっている。試作ではブレッドボードに差すために細いヘッダピンを買ってきて、これを使うことにしよう。
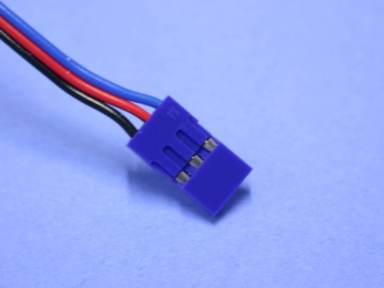 三和の場合、Zコネクタは青いのが特徴。大抵のサーボは3pinコネクタだ
三和の場合、Zコネクタは青いのが特徴。大抵のサーボは3pinコネクタだ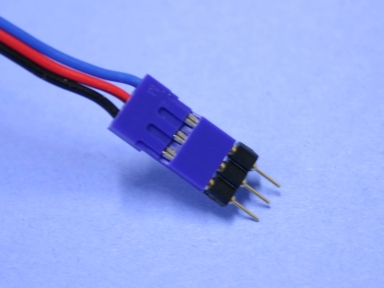 ヘッダピンは秋月電子で購入。テスト用なのでブレッドボードに差すためこれでいい
ヘッダピンは秋月電子で購入。テスト用なのでブレッドボードに差すためこれでいいさて、RCサーボの制御だが、資料を調べると大体以下のように書いてある。
(1)サーボ信号は大体50Hz(20ミリ秒毎)の繰り返しPWM信号
(2)中立位置のパルス幅は1.5ミリ秒、左右500マイクロ秒(つまりパルス幅は1〜2ミリ秒の間)
「春の工作教室」で使ったPIC12F675の場合、デジタル出力は最大“5”で、多数のサーボを逐次プログラム制御するとしても20/2=10台という計算になるのでプログラムによる制御で問題なさそうだ。
サーボのスペックを見ると、基準となる速度は60度移動の時間で記載されており、これは中立から一杯まで切る実用角度のようだ。左右あるのでサーボモーターの実用的移動範囲は120度ということになるが、大抵のサーボは180度程度は動くということを頭の隅に入れておくとよい。
割り込みを使う
Copyright © ITmedia, Inc. All Rights Reserved.
アクセストップ10
- きょう発売の「MacBook Neo」、もうAmazonで割安に (2026年03月11日)
- セールで買った日本HPの約990gノートPC「Pavilion Aero 13-bg」が想像以上に良かったので紹介したい (2026年03月11日)
- 10万円切りMacが17年ぶりに復活! 実機を試して分かったAppleが仕掛ける「MacBook Neo」の実力 (2026年03月10日)
- 12機能を凝縮したモニタースタンド型の「Anker 675 USB-C ドッキングステーション」が27%オフの2万3990円に (2026年03月11日)
- 3万円超でも納得の完成度 VIA対応の薄型メカニカルキーボード「AirOne Pro」を試す キータッチと携帯性を妥協したくない人向け (2026年03月12日)
- 「MacBook Neo」を試して分かった10万円切りの衝撃! ただの“安いMac”ではなく絶妙な引き算で生まれた1台 (2026年03月10日)
- 新品は絶滅、中古は高騰──「令和にMDを聞きたい」と願った筆者が、理想の再生環境を整えるまでの一部始終 (2026年03月13日)
- M5 Max搭載「14インチMacBook Pro」がワークステーションを過去にする 80万円超の“最強”モバイル AI PCを試す (2026年03月13日)
- エンスージアスト向けCPU「Core Ultra 200S Plus」登場 Eコア増量+メモリアクセス高速化+バイナリ最適化でパフォーマンス向上 (2026年03月11日)
- 新型「MacBook Air」はM5搭載で何が変わった? 同じM5の「14インチMacBook Pro」と比べて分かったこと (2026年03月10日)
過去記事カレンダー
Feed Back
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。